
在人形机器人技术的迅速发展中,姿态控制已成为一个重要领域。上海人工智能实验室研发的HoST(Humanoid Standing Technology)算法使机器人能在复杂环境中自主站立,这项技术在提升抗干扰性能的同时,还将深度学习融入动态平衡控制策略中,为其在工业生产、医疗护理等领域的应用提供了技术支持。
控制技术的演进历程
人形机器人的控制技术发展有着清晰的轨迹。20世纪首批人形机器人仅具备基础机械动作,直到计算机技术与人工智能的结合才带来质的飞跃。波士顿动力公司(Boston Dynamics)开发的阿特拉斯(Atlas)机器人展现了显著进步,其先进的控制系统使其能完成跑酷般的灵活运动。
HoST算法的核心创新
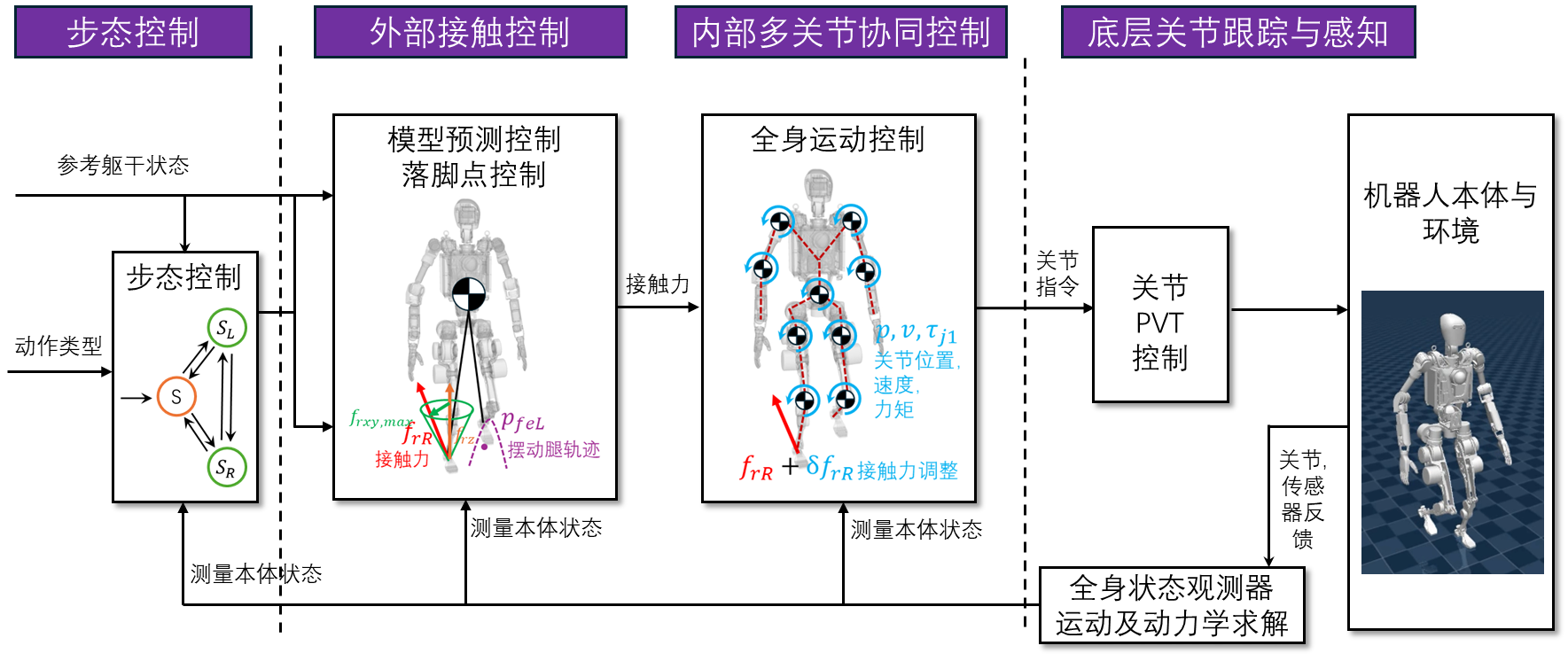
HoST算法通过多模态感知系统和强化学习,使机器人能够快速分析环境并调整运动策略。该算法采用多评论家架构优化策略,有效避免运动中的抖动问题。在硬件优化方面,减少了对复杂物理模型的依赖,降低了计算资源需求。

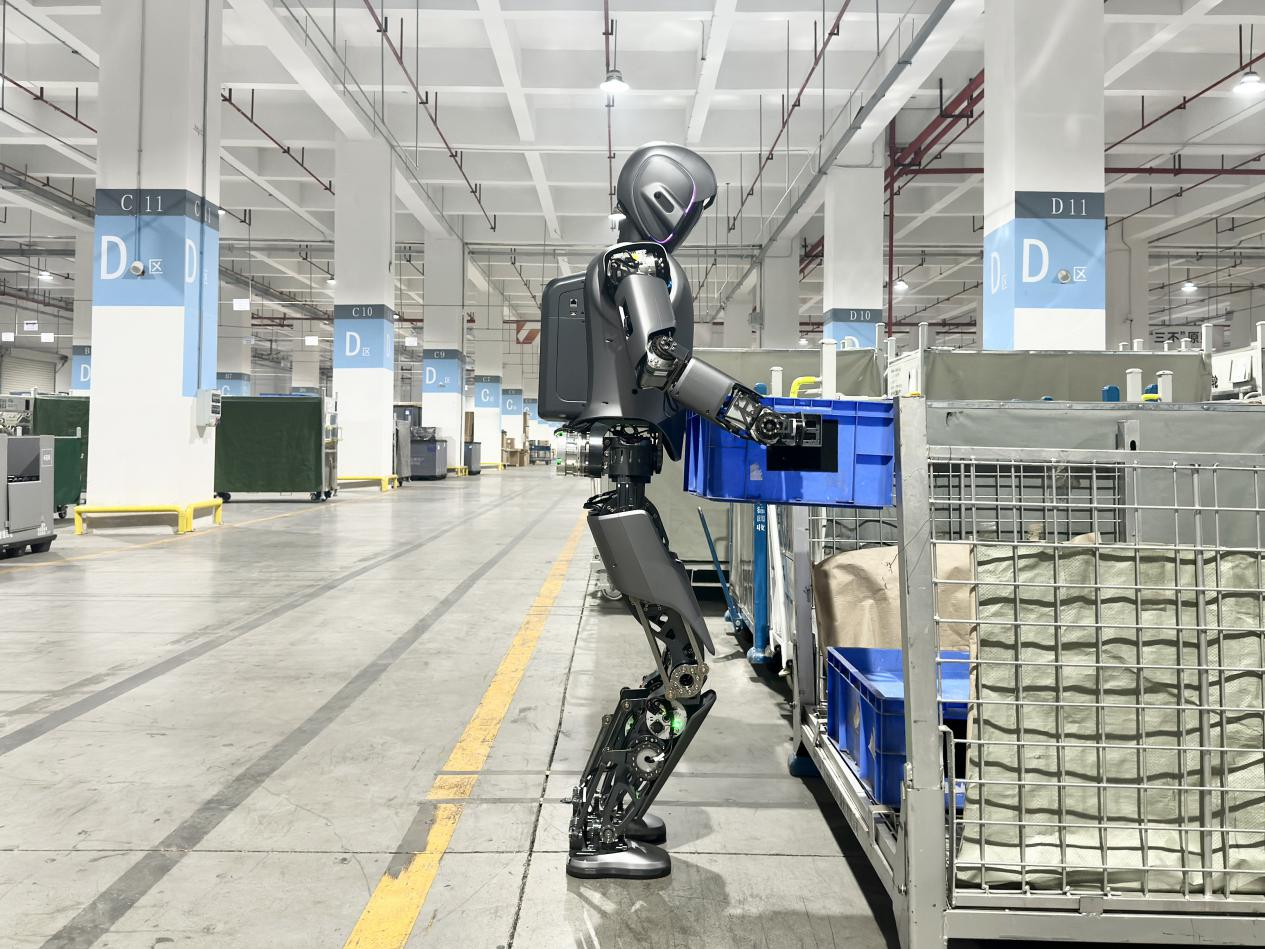
应用场景与技术挑战
在医疗领域,机器人协助护士进行物品搬运,但需要应对医院环境的复杂变化。在工业生产中,它们需要处理不同规格的产品,保持精确的操作。在家庭环境中,则要适应地毯、瓷砖等不同地面,同时避开家具障碍。

人工智能赋能控制系统
深度学习算法使机器人获得了类似人类的学习能力。通过海量数据训练,它们能够应对意外情况并作出合理决策。多模态感知系统让机器人能够理解语音指令并识别人脸,实现自然的人机交互。
未来应用场景展望
在工业领域,机器人将成为更灵活的协作伙伴。在家庭服务中,它们可能承担起智能管家的角色。在教育领域,个性化的机器人教学助手可能改变传统教学模式。这些应用将重新定义人机交互方式,推动社会发展。
